Physical Computing - Was ist das?
Bei Physical Computing handelt es sich um ein interdisziplinäres Wahlpflichtfach, bei dem auch Studierende unterschiedlicher Studiengänge gemeinsam im Team am selben Projekt arbeiten. Die TeilnehmerInnen kommen aus den Bachelorstudiengängen Medieninformatik, Industrie-4.0-Informatik, Elektro- und Informationstechnik, Künstliche Intelligenz sowie Medienproduktion und -technik.
Nach kurzen Einführungen durch die Dozenten in Arduino-/Atmel-/ESP32/RP2040-Mikrocontroller, Raspberry Pi, Mindstorms- bzw. Aldebaran-Roboter-Programmierung sowie 3D-Design mit Blender, 3D-Druck und Lasercutting planen und entwickeln die Studierenden eigene Projekte, meist in Zweier- oder Dreier-Teams.
Während die Dozenten in den ersten Jahren viel thematische Freiheit ließen (mindestens zwei der vorgestellten Technologien sollen in jedem Projekt verwendet werden), wurde die Veranstaltung seit dem Sommersemester 2018 jeweils unter ein Motto gestellt:
- MQTT-Aktorik und Sensorik mit gemeinsamer Broker-Visualisierung(SoSe 2018)
- Ambient Assisted Living/Smart Senior (SoSe 2019)
- Corona Helferlein (SoSe 2020/SoSe 2021)
- Smart City (SoSe 2022)
- Interaktive Spiele mit Sensorik/Aktorik (SoSe 2023)
- Demonstratoren für alternative Energien, Energiemix (SoSe 2024)
- Konnektivität trifft Sensorik und Mechanik (WS 2024/25) - Video auf YouTube
Aus der Anfangszeit der Veranstaltung gibt es auch ein Video auf der Hochschulwebseite, außerdem ein Interview auf 1-2-3 Campus.
Erfolgreich abgeschlossene Projekte
Wintersemester 2014/15
- Sortieranlage (nach Farbe, Material, Gewicht/Größe) auf Basis von Lego Mindstorms, Arduino, Farbsensor, Drucksensor, Servomotoren: Martin Blodig (EI4), Julia Richthammer (MT5)
- Mindstorms EV3 Mars Parcours: Robert Furche (AI), Tamara Graf (AI), Nils Steinlein (AI)
- Gruselkopf auf Basis von 3D-Druck, Arduino, Ultraschallsensor, Lautsprecher, Motorsteuerung: Adelheid Gonschorek (EI3), Franziska Heldmann (AI3), Mandina Amrhein (AI6)
- HD-Live-Kamerabild per WLAN-Streaming von mobilem Fahrzeug mit Ultraschall-Sensor und Fernsteuerung: Andreas Nießl (AI)
Sommersemester 2015
- Ferngesteuerte Ameise “Ardonio” (Basis: Arduino, 12 Servomotoren): Stefan Stiegler (EI), Raphael Kremser (EI), Norbert Rüppel (EI)
- Tweeting Bird House (Basis: RaspberryPi, Infrarotkamera, WLAN, Web-Frontend mit Twitter, Holz-Lasercut): Patrick Schießl (AI6), Klaus Mick (EI), Benjamin Weigl (AI6)
- Steuerung eines Roboters/Modellautos mittels Hand-/Armgesten (Basis: Arduino, Kinect): Michael Walz (EI 6), Sebastian Balzer (EI 6), Florian Wick (MT 4)
- Socken-Sortieranlage (Basis: Arduino, RFID-Tags, RFID-Leser, Roboterarm-Bausatz): Sebastian Zeh (EI 6), Niels Thiele (EI 6), Damian Uczulko (EI 6)
- Fahrradsicherheitssystem: Fahrtrichtungsanzeiger (Kopfbewegung/Gyroskop, Signaltongeber) sowie automatisches Bremslicht (Beschleunigungssensor). Basis: Arduino, Bluetooth, Fahrradhelm, 3D-Druck (Gehäuse): Philipp Hess (EI), Julian Arnold (EI), Jörg Pichl (EI)
- Autononmous RFID Car (Basis: Arduino, RFID, Ultraschallsensor, Bluetooth, Magnetometer, Mindstorms EV3): Christian Binkowski (EI), Oliver Hoffmann (EI), Katrin Lutter (AI)
- Car Pi Automotive Entertainment System Model (Basis: Raspberry Pi, Arduino Yún, Sensorik: Druck-, Temperatur-, Abstandssensor, Servomotor): Stefan Pölloth (AI6), Adrian Saalfrank (AI6)
Wintersemester 2015/16
- CocktailMaster – Automatischer Barmixer (Basis: Android App, Sprachkommandos, Arduino Uno, Arduino Yún, Alkoholsensor, 6 Pumpen, rezeptbasierte Steuerung, OSC): Mirjam Donhauser (AI5), Cornelia Ott (AI5), Theresa Schuster (AI5)
- Nao on Stage (Basis Aldebaran Nao Roboter, Python, Sensorik): Kamera, Berührung, Ultraschall, Infrarot, gescriptete Sprachinteraktion (Chat) inkl. Spracherkennung für Ratespiel, Nachtrommeln von durch Menschen vorgeklatschten Rhythmen uvm.: Michael Schormüller (EI), Christian Meinke (EI)
- KiNao – Imitierung der Bewegung eines Menschen durch einen humanoiden Roboter mit Hilfe einer Microsoft Kinect V2 (Basis: Aldebaran Nao, Kinect V2, RaspberryPi, OpenCV Objekterkennung, Python, .NET C#): Simon Ott (EI7), Fabian Schreier (EI7) und Sebastian Wieland (EI7)
Sommersemester 2016
- LED Cube (Basis: Arduino, 125 Leuchtdioden dreidimensional angeordnet gelötet, selbst entworfenes Platinenlayout mit Schieberegistern etc.): Bachfischer Florian (EI6), Biehler Martin (EI4)
- Bau einer professionellen CNC-Fräse (Basis: Arduino, Raspberry Pi, 7-Zoll-Touch Screen, Mono, G-Code-Interpreter, Nema 23 Stepper Motor): Benjamin Cakmak (EI4), Christian Bauer (EI4)
- Grillmeister – instrumentierter Grill mit Biereinspritzung (Basis: Raspberry Pi, Arduino, Grill, Hochtemperatursensor, Fischzange, Ventilator, Pumpe, Web-Frontend mit jQuery, Bootstrap, Facebook-SDK): Steffen Bauderer (EI), Martin Obermeier (EI), Tobias Nickl (AI6), Jonas Herzog (EI)
- Low Cost Oszilloskop (Basis: STM IDISCOVERY mit ARM Cortex M4, 4-Zoll-Farbdisplay mit DSI, 3D-Druck Gehäuse, Messhandschuh): Alexander Lambert (EI4), Philipp Wiesner (EI4), Stefan Bäumler (EI4)
- Intelligenter Biergarten – Bluetooth-basiertes Ortungssystem mittels Trilateration (Basis: 3 Raspberry Pi, Temperatursensor, Drucksensor, Arduino Mini Pro, Beschleunigungssensor, Platinenlayouterstellung mit Eagle, 3D-Druck Gehäuse): Tobias Lolacher (EI6), Matthias Meier (EI6)
- MOBSpot – Automatische Kameranachführung zur Drohnen/Objektverfolgung (Basis: 3D-Druck, Raspberry Pi mit PiCam, Servomotor, OpenCV): Matthias Janko (EI4), Benjamin Nickl (EI4), Oliver Stefan Schneider (EI4)
Wintersemester 2016/17
- Luminoglass – Funkvernetzte Cocktailgläser mit RGB-LEDs in einem 3D-gedruckten Sockel, Gestenerkennung, Zentrale Steuerung und Überwachung mittels einer GUI auf Basis von Visual C#, die Gläser können damit z.B. im Takt der Musik leuchten, aber auch individuell oder paarweise interagieren, “crowd-Effekt”: Das Trinkglas wird zum sozialen Medium mit Blickkontakt. Lena Rybak (EI6), Maximilian Müller (AI6), Nels Appold (AI6)
- Smart Fridge – Mit Sensorik (Temperatur, Luftqualität/Faulgase, Luftfeuchtigkeit, Gewicht von Produkten) instrumentierter Kühlschrank (Modell), Barcode-Erkennung, Verwaltung der Mindesthaltbarkeit. Johannes Wiesneth (AI6), Thomas Forster (EI6)
- Smart Mirror – Auf TV-Bildschirm basierender Großflächenspiegel mit Raspberry Pi, Kamera, Gestenerkennung, Erkennung von Medikamentenpackungen, Verknüpfung mit Kalender, email, Wettervorhersage. Benedikt Martens (EI6), Dominik Bittner (EI6)
Sommersemester 2017
- Modern Gladiators – Drei autonome Fahrzeuge bewegen sich in einem Spielfeld und weichen virtuellen Schüssen (Android-App) aus. Technologien: 3D-Druck, Ultraschallsensoren, LED-Leisten, Summer, Elektromotoren, Python, Webcam, C++-Programm mit OpenCV zur Positions-Erkennung, Beschleunigungssensoren, Raspberry Pi A+, WLAN, Android-App zur Steuerung) Michael Grehl (EI6), Thomas Pilhöfer (EI6), Alexander Wagner (EI6). Dieses Projekt lief über zwei Semester
- Mühle 3D – Mühle-Spiel, bei dem sich die Spielsteine selbst bewegen. Technologien: Elektromagnete, Motoren, Raspberry Pi, C++, Holz-Lasercut: Florian Bauer (EI6)
- Scroll-Ring – Fingerring mit kapazitivem Sensor, der es ermöglicht, ohne die Hände von der Tastatur zu nehmen, Bildschirminhalte zu Scrollen oder andere kontinuierliche Werte wie Lautstärke oder Helligkeit einzustellen. Technologien: Arduino Yún, MQTT. Thomas Altmann (AI6), Christian Ochsenkühn (AI6)
Wintersemester 2017/18
- Wild Robotics Dialog-Szenario mit dem humanoiden Roboter Pepper von Aldebaran bzw. Softbank: Tim Heidner (MT3) und Annika Pischel (MT3), s. Beispiel regionales Presseecho auf Seite 64.
- Flipper Box (Steuerung, Holz-Lasercut, Unreal Game Engine): Elias Peter (MT), Florian Schmidbauer (MT)
- Rubik’s Cube Solver: ein realer Rubik-Würfel (Standardgröße) in beliebiger Ausgangskonstellation wird mit selbst entwickelter Mechanik gelöst. Technologien: Holz-Lasercut Raspberry Pi, Motoren, PiCam, Python. Martin Kleber (AI6), Robert Kraus (AI6), Ulrich Peschke (AI6)
Sommersemester 2018
Gemeinsames Thema: ESP32- und MQTT-basierte Sensorik und Aktorik. Jeder Sensor liefert 1–3 kontinuierliche numerische Werte, die über eine zentrale Broker-Visualisierung mit Großflächen-Touchscreen dynamisch zu beliebigen Aktoren geroutet werden können, die diese Werte in Aktionen oder Visualisierungen umsetzen. Vorführung (Projekte-deadline) am Tag der offenen Tür der Hochschule, 8. Juni 2018
- Franziska Fenzl (AI6), Dominik Flierl (AI6): MQTT Zentrale Broker-Visualisierung in JavaScript und API für C++/ESP32- und JavaScript-Clients
- Christian Bayer (AI6): Sensor: selbst entwickeltes Arkade-Board, Aktor: selbst entwickeltes Spiel (auf Basis von PixiJS)
- Florian Grünauer (AI6): Sensor: Pendel mit Ultraschallsensor und Accelerometer, Aktor: Pinocchio mit Druckluft-gesteuerter, variabler Holznase
- Moritz Prüfling (AI6): Sensor: Leap Motion-Handsteuerung, Aktor: 32x32-LED-Matrix
- Samuel Flach (EI6) und Philip Jahn (EI6): Sensoren: 2-Achsen-Neigungssteuerung per Hand, Aktor: lenkbares Fahrzeug (Bausatz) mit eigener Steuerung, Plexiglas-Lasercut (Gehäuse Handsensor)
- Simon Kunz (EI6): Sensor 1: Handschrifterkennung (Ziffern) mit neuronalem Netz, Sensor 2: Ball-Tracking per Raspberry Pi mit Kamera, Aktor 1: Visualisierung mit selbst gebautem LED-Streifen
- weitere Sensoren und Aktoren von den beteiligten Professoren (Pustesensor, Beschleunigungssensoren, etc.)
Sommersemester 2019
Die Fragestellung in diesem Semester lautete: Wie lässt sich Sensorik, Informations- und Kommunikationstechnik so verknüpfen, dass sie älteren Menschen im Alltag hilft? Die Ergebnisse stellten die Teams am 6. Oktober 2019 beim "50+ Fit und Aktiv Tag" im Amberger Congress Centrum vor.
- Locatable KeyGuard: Das System verhindert über eine selbst entwickelte Indoor-Lokalisierungsfunktion eines Schlüsselanhängers, dass eine Person ohne einen Schlüssel den überwachten Raum/die Wohnung verlässt. Wird die Wohnung dennoch ohne den Schlüssel verlassen, ertönt ein akustischer Hinweis, der Türöffner wird für einige Sekunden betätigt, um ein Zurückkehren in die Wohnung zu ermöglichen. Team: Friedrich Graaf (AI6-II) und Thomas Schmidt (AI6-II); Hardware: 7x Feather M0 LoRa, Raspberry Pi, Reed-Kontakt
- Smarter Badezimmer-Spiegel: Der Spiegel ist gleichzeitig auch ein Display und erinnert an Termine, Medikamenteneinnahme etc. und lässt sich mit intuitiver Gestensteuerung interaktiv bedienen. Auch eine experimentelle Gesichts- und Emotionserkennung ist realisiert. Team: André Kestler (EI4), Matthias Stangl (EI6), Jonathan Epp (EI4); Hardware: 40-Zoll UHD-TV mit Spiegelfolie, Intel Realsense Depth Camera, USB-Kamera, Intel NUC Mini-PC
- Automatischer Pillendosen-Bestücker: Zur sicheren Tabletten-Dosierung wird automatisch anhand von Benutzerprofilen die richtige Anzahl an Tabletten aus Magazinen ausgegeben. Mit Sprachausgabe wird die Bedienung sinnvoll ergänzt (z.B. Warnung, wenn ein Magazin leer läuft) und die Funktionsweise des Geräts ist durch eine Plexiglas-Ummantelung beobachtbar. Team: Stefan Ries (II4), Thomas Götzl (II4), Dominik Smrekar (II4); Hardware: Raspberry Pi, Arduino, Servomotoren SG-90, Schrittmotor, Treibermodul DRV8825, 7-Zoll Touch-Display, Lautsprecher, 3D-Druck, Plexiglas-Lasercut
- SmarTablett: Ein Smartes Tablett unterstützt mit Display, RFID-Technologie und automatischer Wiege-Einrichtung die wunschgemäße und korrekte Essensausgabe in Heimen, Krankenhäusern etc. auf Tabletts individuell. Team: Lukas Möges (AI6-MI), Alex Pölloth (AI6-MI), Sebastian Steindl (AI6-MI); Hardware: Raspberry Pi, 7-Zoll Display, Wiegezelle mit HX711 24-Bit-Analog-Digital-Wandler, RFID-Modul RC-522
- Notfall-Uhr mit Beschleunigungssensor, GPS- und SMS-Modul: Im Notfall (z.B. per Knopfdruck oder automatisch erkanntes Fallen) kann Hilfe per SMS benachrichtigt werden. Team: Manuel Zimmermann (II4), Johannes Horst (II4), Saniye Ogul (II4); Hardware: LIS3DH, SIM800I, NEO-6M, ESP12, OLED-Display, selbst entwickelte SMD-Platine, 3D-Druck
Wintersemester 2019/20
- 2D-Süßigkeiten-Plotter: Schokoladenguss wird mittels Steppermotoren-gesteuerter Kunststoff-Spritzen und G-code zweidimensional z.B. auf Butterkekse aufgetragen. Johann Schneider (MI3), Fabian Meiler (MI3); Hardware: Arduino Mega, NEMA 17 Steppermotoren mit A4988 Treibern
- Smart Remote Control: Eine Fernbedienung für alle Geräte in einem Smart Home: Mit der Fernbedienung zeigt man einfach auf das zu steuernde Gerät und kann es dann intuitiv mit Gesten (z.B. rauf/runter für Jalousien oder die Lautstärke des Fernsehers) bedienen. Team: Tobias Bauer (II3), Michael Wagner (AI7); Hardware: 5 Marvelmind Beacons HW4.9, MPU-9250, ESP32 mit OLED-Display; Protokoll u.a. MQTT
- Infrarot-Schießtrainer: Andreas Lippert (II3), Harun Tacli (II3); Hardware: ESP32, Touch-Sensor, Infrarot-LEDs/Receiver; Protokoll: MQTT
Sommersemester 2020
- Erweiterung des Fahrschlittensystems für DSLR-Kameras um eine Drehachse und Senkrechtschlitten für automatisierte Panoramaaufnahmen/Kamerafahrten (Alexander Jaeger, Jan Friedrich) PI/PI-Zero, Android-App
- Remote-Spiel mit Kamera auf Zeichenfeld (Andreas Klier, Felix Stockmeyer, Matthias Schießl) PI, PI Kamera, Servos,(Arduino)
- Remote-Brettspiel Mensch-Ärgere-dich-nicht mit LEDs und Sensorik mit Steuerung über Touch- und Ultraschallsensoren (Caroline Bengart, Anna-Lena Gassner)
- LED Mühlespiel (Christopher Höchtl)
- LED-Labyrinth und diverse andere Spiele mit Remote-Steuerung (Madina Kamalova, Andrei Trukhin) Lagesensor, JOY-IT Vollfarb-Matrixmodul 64x64
- Trinkmessung per Wägeeinheit (Nick Kellermanns, Lukas Reindlmeier)
- Abstandsmessung im öffentlichen Raum mittels Bild- und Sensorverarbeitung (Stefan Maier, Philip Sellner) Raspberry Pi, Lautsprecher, Sensorik, Kamera (2D)
Wintersemester 2020/21
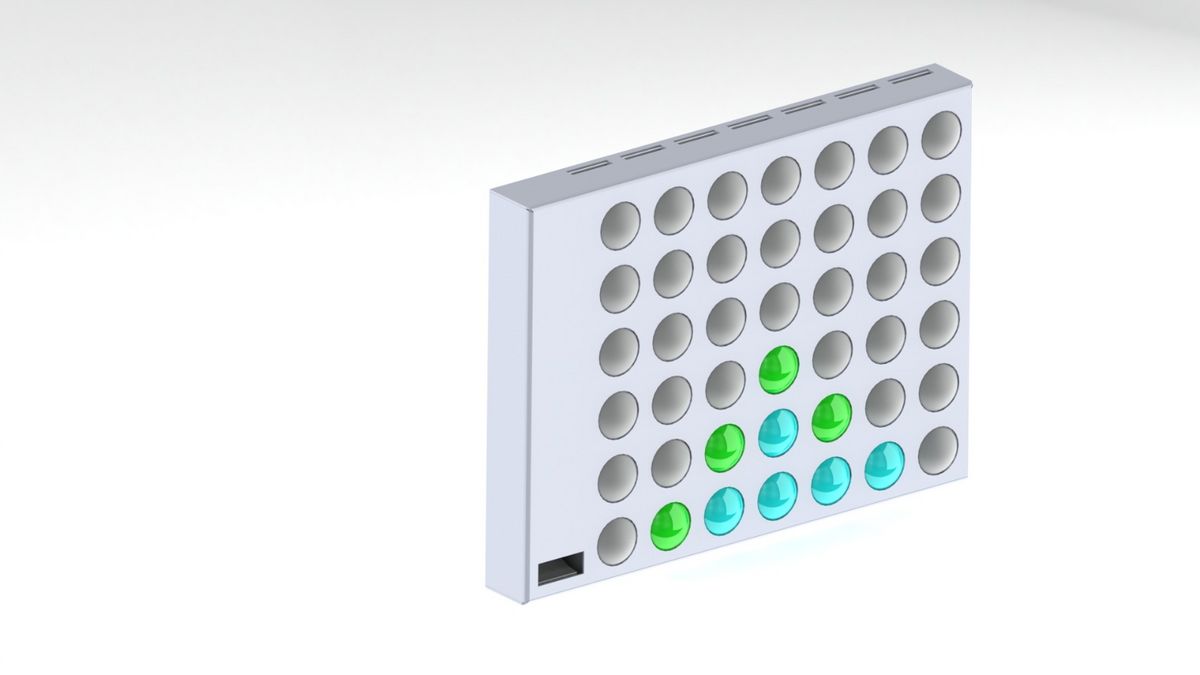
- Remote 4-Gewinnt (Julia Neußinger, Daniel Hannes, Tobias Lettner)
- Smokerregelung / -steuerung (Johannes Bauer)
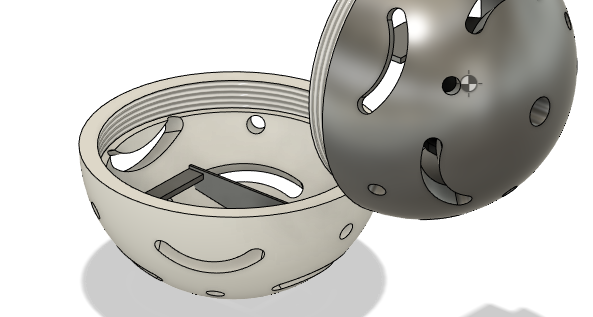
- Sensor-Kugeln (Arsen Oganisyan, Arina Antskaitis, Nikolett Rácz) 2 Kugeln die sich durch eingebaute Sensorik (Temperatur, Beschleunigung, Lage) gegenseitig beeinflussen. Eingebaute Aktoren und LEDs sorgen für Feedback & Interaktion.
- Remote Beer-Pong Tisch (Julian Probst, Simon Gotzler)
- Remote Ziel- & Schießspiel für 2 Spieler (Pascal Kees, Liam Schäfer)
Sommersemester 2021
- Automatische Desinfektionsstation für Einkaufswägen DESOCUBE (Christopher Höchtl, Adrian Danner)
- Smart Bottle Getränkeerkennung (Arina Antskaitis, Etem Karao)
- Stumpenroboter – ein autonomer Zigaretten-Sammler (Florian Hofmann, Marcus Haberl)
- Smart Alarm Clock (Anja Stricker, Philip Bartmann, Ulrich Stark)